






- 地域連携外部ページTOP
- 研究者シーズ
- 櫻田 陽/ SAKURADA Akira
振動制御システムの開発
- 氏名
- 櫻田 陽/ SAKURADA Akira
- -
- 職名
- 准教授
- 学位
- 博士(工学)
- 所属学会・協会
- 日本機械学会,精密工学会,日本AEM学会
- キーワード
- 位置決め,振動制御,圧電素子,粘弾性体,ロボット(リハビリテーション)システム制御
- 技術相談
提供可能技術 - ・ 精密位置決め機構(高速・高精度)に関するテーマ
・ 振動抑制や平面減衰機構に関するテーマ
・ ロボット(リハビリテーション)の制御システムに関するテーマ
研究内容
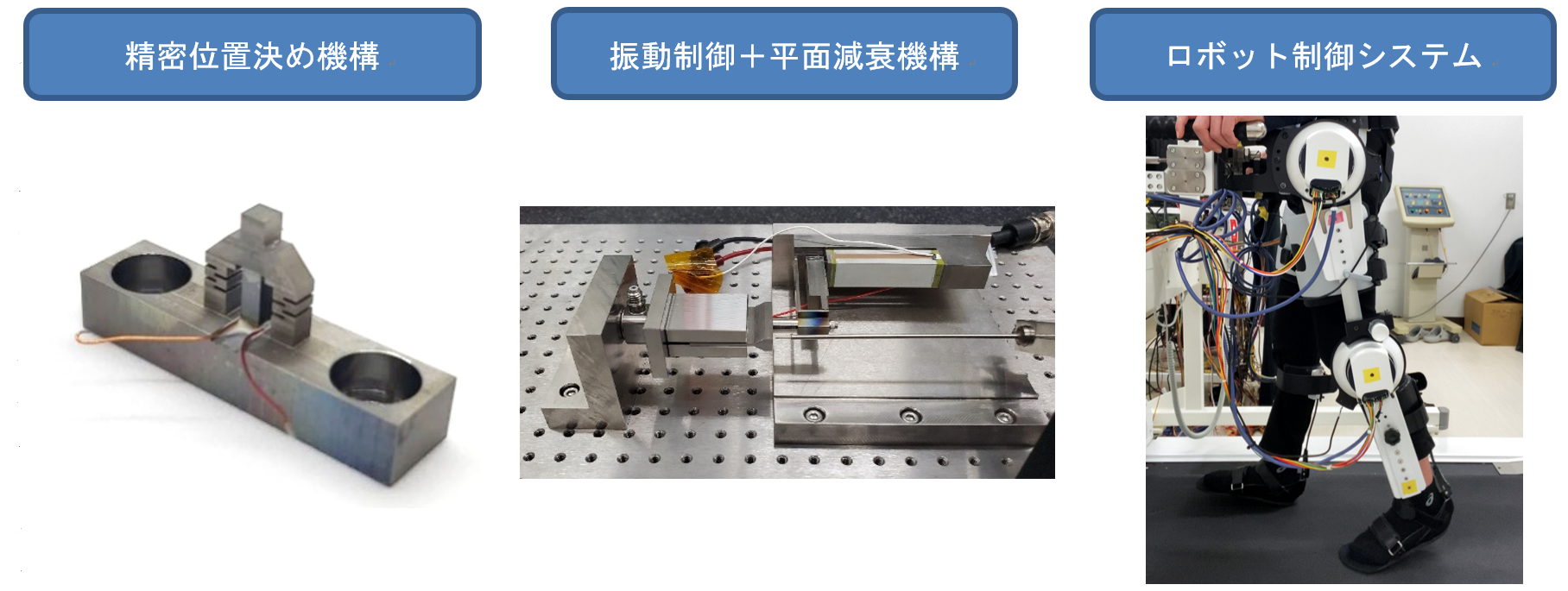
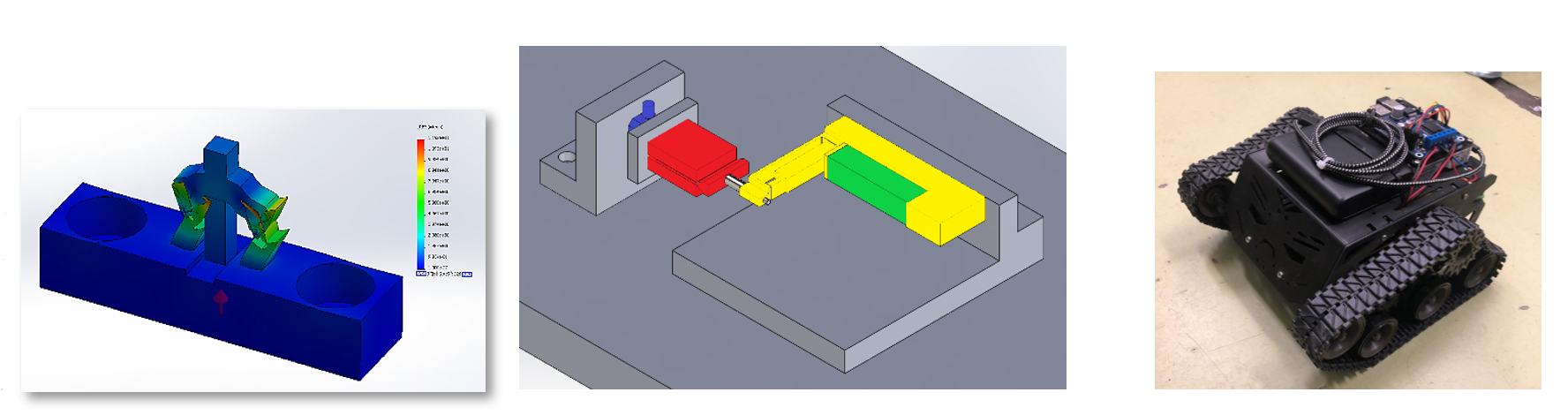
これまで,光ファイバー式非接触変位計,レーザースケール,フォースセンサーを使用し,駆動源に圧電セラミクス,積層型圧電素子,位置と力をフィードバックする機構やシステムの研究を行ってきました.それらの研究に伴い,高速に振動する構造体の振動抑制およびダンパーや動作を制御するコントローラの応用展開を目指し,画像による侵入者検知や2次元センサを用いた障害物検出,関節角度等のセンサから姿勢推定およびリハビリテーションロボットの制御システムなど,異業種交流を積極的に進めたいと考えております.
提供可能な設備・機器
| 名称・型番(メーカー) | |
|---|---|
| MTI-2100 (MTI Instruments Inc.) | FRA5097 (NF Corp.) |
| Kistler 5015A (Kistler) | RPLIDAR A2M8 (Seeed) |
| DSP MIS Seagull | |
![]()