






- 地域連携外部ページTOP
- 研究者シーズ
- 木澤 悟/ KIZAWA Satoru
Kinectを用いた上肢リハビリ支援システムの開発

- 氏名
- 木澤 悟/ KIZAWA Satoru
- kizawa@akita-nct.ac.jp
- 職名
- 教授
- 学位
- 博士(工学)
- 所属学会・協会
- 日本機械学会,日本福祉工学会,日本臨床バイオメカニクス学会
- キーワード
- バイオメカニクス,ロボット,ニューラルネットワーク,FES
- 技術相談
提供可能技術 - ・リハビリテーション機器の設計開発
・制御機器の応用
・MATLAB/SimulinkおよびScilab
研究内容
Kinectはマーカレスで人間の身体の関節情報を推定する機能を持っているが,逆にマーカーを取り付けた任意の位置情報を取得することは難しい.そこで,モーションキャプチャーとしての機能を構築するために,任意の位置に貼り付けたマーカーの位置情報を取得するための機能を開発した.さらに,開発したKinectシステムを上肢リハビリ装置に組み込み,システムを駆動制御するセンサーの役割とともに各関節の運動情報を取得することを検討した.
〇実験装置
図1に開発した制御システムの基本構成を示す.主に駆動制御,力覚センサー,Kinectから構成される.また,携帯性を考慮してノートPCを基本に全てのデバイスがUSBで接続されている.
図2はKinectを上肢支援リハビリ装置に組込んだシステムである.マーカーは手首,肘,肩および装置の位置情報取得のために装置本体に設置した.
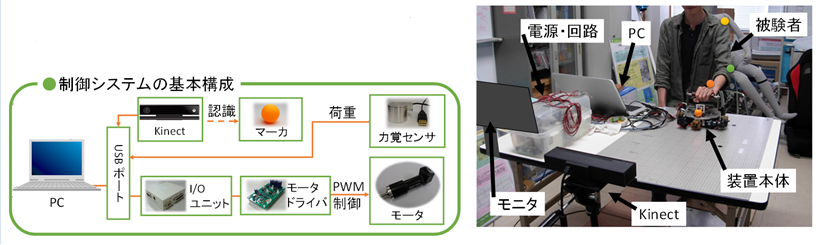
図1 制御システム 図2 上肢支援リハビリシステム
〇研究成果
・Kinect V2を応用して任意に指定したマーカの3次元位置情報の取得に成功した.
・マーカを上肢の各関節に貼付することで,モーションキャプチャーとしての機能が得られた.
・Kinectはモーションセンサー機能と同時に制御装置の位置制御にも利用可能である.
・VICONによる精度の比較実験から最大誤差は5mm程度に抑えられ,安価なモーションセンサーとしての応用が期待できる.
提供可能な設備・機器
| 名称・型番(メーカー) | |
|---|---|
| 回転型2リンク倒立振子実験装置(リアルテック) | |
![]()